The robot design is a critical component of human-robot interaction. A robot’s appearance shapes people’s expectations of that robot, which in turn affects human-robot interaction. People seem to distinguish between human-like and machine-like robots, with a default visualization of robots having a human-like appearance. However, over the past decade, robotics has gradually undergone a metamorphosis and like a giant growing tree.
Wearable robotics has been expanding in several areas, embracing the civilian and industrial domains. The adoption of smart spring-loaded mechanisms and new materials comprising polymers, carbon fibers, and textiles, complemented with smart sensing-actuation and human-in-the-loop control strategies, is opening a wide scenario where the exoskeletons and exosuits market is expected to grow to US$5.2 billion by 2025. Applications range from medicine and rehabilitation to industry and wellness, with new implications still unexplored in robotics subfields related to psychology, ergonomics, and biomechanics, in addition to mechanics and electronics. If robotics has been the bailiwick of engineers since its birth, the past two decades have been marked by the need to embrace new disciplines. Wearable robotics is transversally permeating science and its practical spheres. In recent years, there has been a wave of innovative solutions from research groups worldwide to bring wearable robotics further into the real world. This article on wearable robots will cover up topics such as lower-limb exoskeletons,upper-limb exoskeletons, back exoskeleton, arm prosthetic, ankle prosthetics.
The EksoGT is a powered robotic exoskeleton that is utilized as a part of a comprehensive therapy program. While wearing the device developed by Ekso Bionics, patients can stand up and walk over the ground for comprehensive gait training. The exoskeleton was able to support 20-min aerobic exercise sessions, showing its potential as a useful tool for real-world poststroke rehabilitation, it could provide opportunities for patients who would otherwise be unable to perform an unassisted ambulatory exercise.
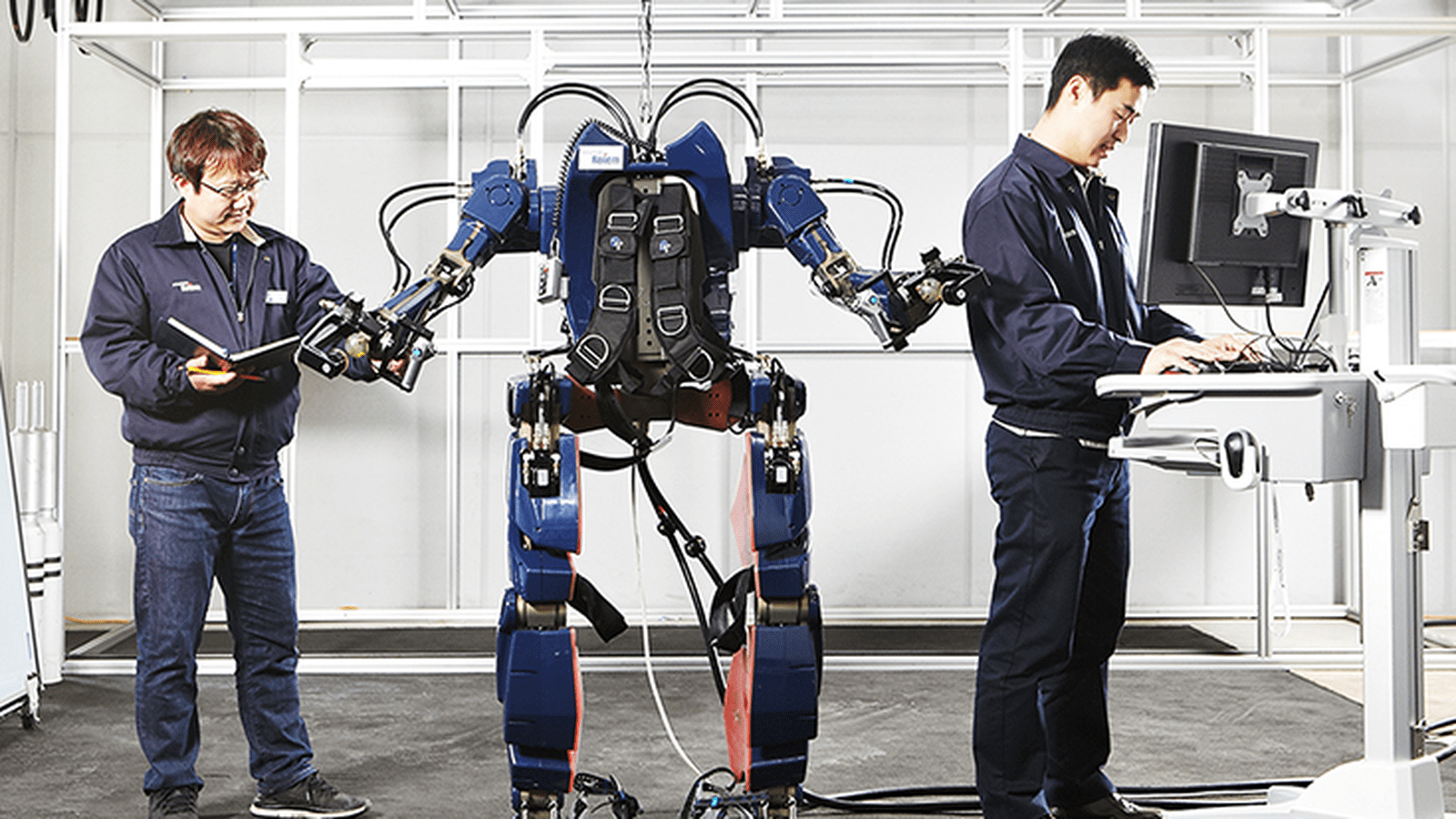
The upper-limb exoskeletons combine an ergonomic design with efficient assistive features. Both devices were evaluated in a range of activities and were able to significantly reduce human muscle demand. The approaches have potential applications in the industrial and health domains and could lead to a new generation of highly ergonomic wearable robots that will behave symbiotically with humans. A passive trunk exoskeleton previously developed in the Spinal Exoskeletal Robot Horizon 2020 project and intended to support workers in occupational settings. The device was able to reduce perceived task difficulty and discomfort in the lower back, with greater effects observed in workers having pre-existing back pain.
A polycentric design of a powered ankle-foot prosthesis design is lightweight and fits within the anatomical foot profile and provides physiological torque, energy, and range of motion. While further evaluations and improvements in closed-loop control are still necessary, the proposed design addresses the limitations of commercially available ankle-foot prostheses and could thus achieve broad adoption among a diverse population of lower limb amputees.
Finally, a novel instrumented crutch system that can be used to analyze arm support during robot-assisted motion. Specifically, such instrumented crutches can provide vital information about how much the user(rather than the robot)contributes to assisted motions, such as g gait and sit-to-stand. The authors use these crutches in three studies of the wearable robots RYSEN and MyoSuit; the studies illustrate the manifold ways in which such instrumented technology can support wearable-robotics research and development.
Wearable robots are, without a doubt, an exciting new technology that promises to greatly improve humans’ quality of life by alleviating physical disabilities and augmenting existing capabilities. However, despite remarkable advancements in the field, there are still important technological and theoretical barriers that impede the mass adoption of such robots.